想像一下,一台機器人走出安全圍欄,不再只是執行單一預先編寫好的程式動作,而是與人類並肩工作。它能穿梭於雜亂的走道;當棧板發生意料之外的位移時,它會停下腳步;它能抓取從未見過的零件,並根據力量反饋(force feedback)調整抓取力道,在不造成產線停機的情況下完成任務。
直到不久前,這種場景還只存在於實驗室的展示和研發會議的精華影片中。在工業界,機器人學過去是建立在「可預測性」之上的:結構化的環境、確定性的常規流程,以及漫長的整合週期。
而現在,局勢正發生根本性的轉變。機器人學正進入一個創新產生複利效應(innovation compounds)的超級週期(supercycle)。過去需要數十年才能進入主流市場的技術,現在只需幾年、甚至幾個月便能湧現。此外,最先受到這波衝擊的並非消費級電子小玩具,而是工廠車間、倉庫以及整個物流網路——在這些地方,毫秒級的響應、運作時間(uptime)和安全性是毫無妥協空間的。
轉變:從線性進步到指數級收斂
機器人技術之所以讓人感覺突然突飛猛進,是因為我們正見證著歷史上數個獨立創新軌道的收斂(convergence):
-
先進感測(Advanced sensing):賦予機器人細膩且具備接觸感知的操作能力。
-
高頻寬、低延遲連通性(Connectivity):實現同步且即時的機器人系統。
-
邊緣運算架構(Edge compute):為即時機器人控制消除了雲端延遲。
-
突破性的致動與運動控制(Actuation & motion control):實現安全、具自適應力且靈巧的機器人運動。
-
新材料與緊湊型高密度系統:實現輕量化、高能源效率的機器人設計。
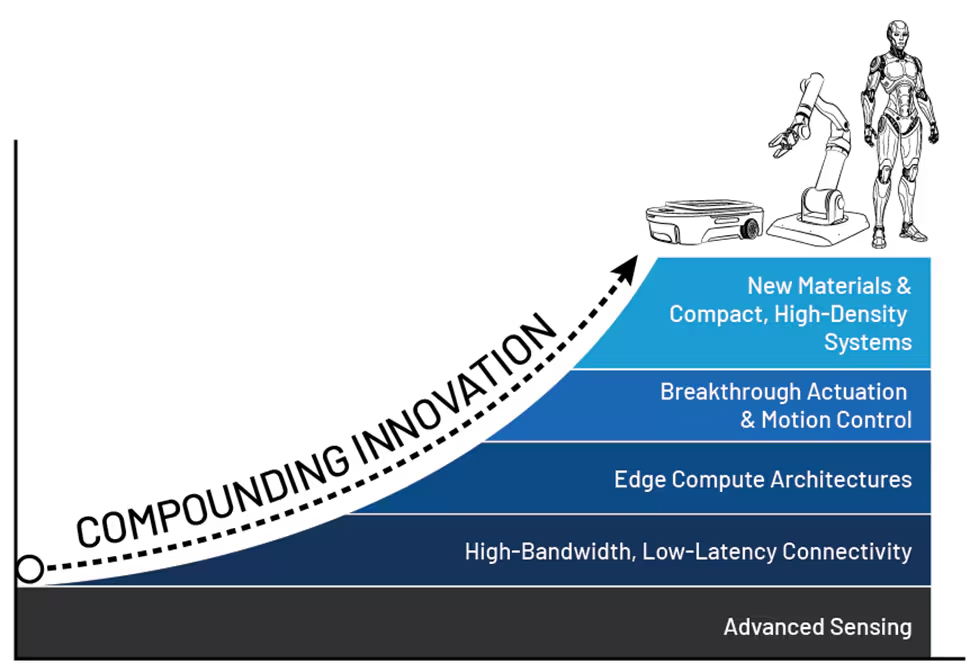
圖 1:驅動機器人超級週期的複利創新。
這些技術每一項都在獨自演進;但更關鍵的是,每一項技術都在促使其他技術加速前進。這形成了一個閉環:
-
更好的感測器產生更豐富、更頻繁的數據
-
更豐富的數據需要邊緣運算,而非高延遲的雲端
-
邊緣運算實現更複雜、具自適應力的運動
-
自適應運動需要更好的致動器與材料
-
這些致動器又產生全新、更高傳真度(fidelity)的反饋
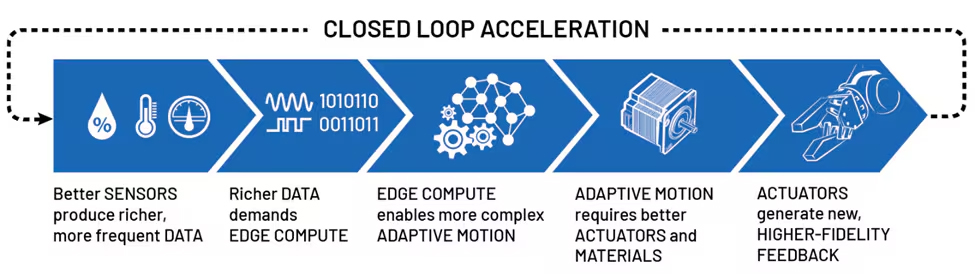
圖 2:技術推進的閉環加速機制。
這個迴路正變得越來越緊密,且不斷加速。每一次的突破都在放大下一次的進步。這正是「複利創新週期」 class 的特徵,也解釋了為什麼機器人過去「能做的事」與現在「做得到的事」之間的差距,正以空前的速度縮小。
為何工業機器人是這波轉變的最前線
大眾媒體往往熱衷於報導消費級機器人(如割草機、掃地機器人、教育機器人),但工業機器人總是率先迎來技術突破。原因很簡單:工業環境對「確定性(determinism)」、「強韌性(resilience)」與「速度」有著極其嚴苛的要求。
工業機器人在運作時面臨著消費級機器人極少遇到的限制:安全規範不容任何差錯、停機損失動輒數百萬、環境動態且雜亂多變,而且人類與機器每天都必須並肩工作。
為了在這些條件下生存並蓬勃發展,機器人必須在毫秒級別內直接在邊緣端進行感測、決策與行動。一台正在工廠車間導航或操作精密元件的機器人,無法等待超過 200 毫秒的雲端往返延遲。其「感測-決策-致動」的迴路必須在本地運行,並具備確定性的時間排程。這項要求正驅動著即時邊緣智能(real-time edge intelligence)的復興,同時也在改變機器人的能力。
從剛性自動化邁向自適應自主性
工業機器人不再只是單純的自動化,它正演變為自適應自主性(adaptive autonomy):系統能夠即時重新配置、回應不斷變化的條件、與人類協作,並在分散式運算節點之間協調複雜的任務。
傳統工廠圍繞著「可預測性」進行設計。生產線是固定的、工作流程是靜態的,機器人的行為是預先編寫好的,驗證一次後便沿用數年。當時的效率來自於極小化變異,而非對變異做出回應。
然而,這個模式正在崩潰。現代工廠被迫在充滿變數、產品生命週期縮短和不斷變化的環境中運作。因此,它們正轉向:
-
即時重新配置(On-the-fly reconfiguration):產線和工作流程無需經歷漫長的停機即可進行調整。
-
動態物流(Dynamic logistics):物料、庫存和機器人根據需求持續重新規劃路線。
-
持續檢測(Continuous inspection):直接內嵌於生產過程中,而非孤立在產線末端。
-
人機協作(Human-robot collaboration):機器安全地在人類身邊工作,不再被關在圍欄後。
-
快速產品切換(Rapid product changeover):以小時或分鐘為單位進行計算,而非數週。
這些能力需要一種本質上截然不同的機器人學:將感測、感知與自適應行為緊密整合的系統,並全數由邊緣端的即時、確定性智能所驅動。其結果是工廠行為的轉變:它們不再像剛性、順序運行的機器,而更像是一個個具備響應能力、強韌性、且能隨條件變化而調整的動態生態系統。
為什麼這個時刻至關重要
機器人終於開始在現實世界中運作,而不僅僅是在結構化的工作單元內。它們穿梭於走道、與人類協作、應對雜亂環境,並操作那些未曾為它們預先規劃好的物體。靈巧性(dexterity)與移動性(mobility)正在同時提升。
上一個機器人時代讓機器人變得「精準」,而這個時代正在讓它們變得「具自適應力」。現在的問題不再是工業機器人是否會變得具備自適應力且通用化,而是企業組織能以多快的速度去設計、部署並信任它們。
當更豐富的感測技術與更快速、具確定性的邊緣智能、自適應運動控制、先進連通性以及能源意識運作相收斂時,某些根本性的東西改變了。機器人不再是特製的機械,而是開始成為工業環境中智能、強韌且通用的作業員。這種即時感測、本地決策與自適應運動的結合,正是我們所定義的「物理智能(physical intelligence)」。