機器人走進開放環境並與人類互動,釐清「感測、決策與控制」究竟在何處執行,對於系統的穩定性、安全性、響應能力以及信任度至關重要。人形機器人面臨著一個根本性的「全身控制(whole-body control)」問題:每一個關節、感測器和致動器(actuator)都必須協調一致,以維持平衡和有目的性的運動。一旦這種協調機制崩潰,機器人就會摔倒。
前一篇文章定義了「物理智能(physical intelligence)」,並解釋了當智能離開抽象的數據世界、進入充滿運動、力和互動的物理世界時,為何會發生本質上的改變。本篇專欄將深入探討機器人智能究竟「活在何處」、其職責如何在中央運算、邊緣系統與局部控制之間進行劃分,以及為什麼這些架構選擇至關重要。
為何「即時性」至關重要:世界不會等你
現代機器人是以分散式系統的形式運作,將感知、狀態估測、策略、規劃與控制在全身上下持續協調,以產生穩定、即時的行為。
在物理系統中,延遲(latency)是一個攸關穩定性的問題:它決定了跨出穩定的一步還是摔倒、是成功抓取還是掉落零件、是平穩停下還是發生安全事故。對於平衡校正、碰撞反射、滑移檢測以及具備接觸感知的運動等行為來說,幾十毫秒(milliseconds)的差距就天差地遠。而時基誤差(Jitter,或稱時間抖動),也就是不可預測的時間延遲,往往比固定的延遲更加致命。
這引導出了物理智能的第一條基本原則:如果機器人要運動,統御該運動的「智能」可以集中化,但運動的「控制」必須在局部執行,且必須遵循可預測且確定性的時程表。
僅靠速度還不夠:「確定性」才是基石
機器人需要的是確定性延遲(deterministic latency),而非僅僅是低延遲。物理智能在一個持續的閉環中運作:感測、決策、行動、觀察、調整。這個迴路每次都必須準時執行。當時間點出現偏差,閉環就會失去穩定,導致系統震盪、猶豫、碰撞、掉落物體或緊急煞車。
確定性運作是所有其他功能的底層基石。沒有它,安全機制就會失效,人機協作也變得不可能;擁有它,機器人才能平穩運動,並在面對不確定性時保持穩定。
全身智能:中央策略,分散執行
人形機器人加劇了「集中化」與「分散式」之間的架構拉鋸。機器人的整個身體是高度耦合(coupled)的,非常需要一個中央「大腦」來對全身狀態進行推理,並將運動協調為一個連貫的系統,這推動了設計朝向高度集中化的智能發展。
-
中央運算(Central Compute):處理全局狀態估測、全身協調、學習策略推論(learned policy inference)、任務級推理、意圖理解和長周期規劃。這些功能受益於全局上下文(global context)和機器人的統一視圖。
-
邊緣節點(Edge Nodes):然而,如果將每一個觸覺事件、馬達電流突波、關節編碼器讀數、慣性測量單元(IMU)更新和相機串流都以原始形式傳送到中央大腦,機器人很快就會陷入頻寬與排程的噩夢。邊緣節點必須進行數據優先級排序與過濾,決定哪些該發送、哪些不該發送,以及什麼是緊急的。
這種模式即是:集中式協作、分散式執行、內嵌式反射,且全部在時間上保持同步。
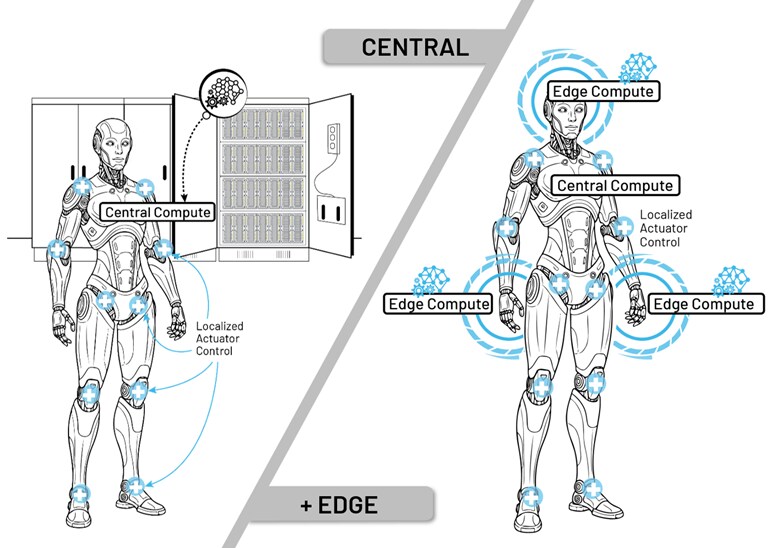
圖 1:現代工業系統的分散式大腦
智能的三個架構層(以及它們存在的原因)
1. 中央智能(Central Intelligence):意圖、策略與全身協調
這一層知道機器人正試圖做什麼。中央智能負責全局協調,但極少執行最快的反射動作。在人形機器人中這點至關重要,因為協調是整體的:當牽涉到平衡時,控制腳踝、肩膀和軀幹是無法分割的。現代系統越來越多地在此處運行基於人工智慧的策略學習,以進行複雜、高維度的控制。
2. 邊緣智能(Edge Intelligence):即時控制、安全與數據減量
這一層在現實世界的時間限制下維持系統的響應能力。它負責穩定運動、強制執行安全的扭矩(torque)與力量限制、管理局部感測器融合,並將高頻率訊號簡化為決策關鍵資訊。系統在局部進行過濾和聚合,而不是將所有數據都向上串流。
3. 內嵌式智能(Embedded Intelligence):致動器與接觸點的反射
最快的控制迴路活在這裡。每個致動器都有自己的局部馬達控制器,用以回應那些發生太快而無法容忍任何額外延遲的事件。這個反射層包括馬達電流調節、關節位置控制、安全執法,以及微觀接觸事件(如觸覺突波和滑移事件)的檢測。這些迴路不需要呼叫主電腦:最安全的響應絕不離開關節、手部或末端效應器(end effector)。
一個簡單的例子:攜帶裝有液體的開放式容器
想像一個人形機器人拿著一個裝了部分液體的開放式容器,走在繁忙的工業走道上。這個看似簡單的動作橫跨了多個時間領域(time domains):
-
內嵌式控制與反射(小於 5 毫秒級別):關節穩定、局部扭矩迴路與限制、抓握微調、滑移檢測和快速干擾抑制。這些迴路必須在致動器/手部局部執行。
-
全身控制(5 至 20 毫秒級別):全身規劃、感知與運動感測器融合、接觸狀態估測、關節協調、障礙物鄰近反應和安全執法。
-
學習策略(50 毫秒以上級別):路線選擇、人類運動預測、任務意圖(「在推進的同時保持容器直立」)以及策略級決策。
過度的集中化會導致緩慢、猶豫不決的行為;而過度的分散化則會產生缺乏連貫意圖的快速反應。物理智能活在兩者的平衡之中:全局意圖與局部反射,如同一個同步系統般運作。
為什麼這種架構至關重要
分散式大腦不僅僅是一種效能優化,它更是以下特性的基石:
-
自然且穩定的運動
-
與人類進行安全協作
-
靈巧的操作能力與接觸感知
-
在不確定性下的現實世界運作
-
具備韌性、可重新配置的工業工作流程
這就是機器人如何超越單純的自動化,並邁向物理智能的方式——將智能放在時間、互動與安全最需要它的地方。