什麼是物理智能(physical intelligence)?本篇專欄的核心在於定義何謂物理智能、為什麼它與傳統的自動化或雲端人工智慧(Cloud AI)有著根本上的不同,以及當智能離開抽象的數據世界,進入充滿運動、力和互動的物理世界時,有哪些至關重要的考量因素。
隨著機器人技術進入一個由「感測、確定性邊緣運算、連通性與自適應運動」相互強化、並推動機器人超越剛性自動化的超級週期(supercycle),其發展結果催生出了一種全新形態的系統——它們不再只是執行預先編寫好的程式步驟,而是具備了物理智能來進行運作。
物理智能源自於一個閉環(closed loop):
-
感測發生的狀況(Sensing what is happening)
-
決定如何回應(Deciding how to respond)
-
對環境採取行動(Acting on the environment)
-
觀察行動的結果(Observing the result)
-
立即進行調整(Adjusting immediately)
在物理世界中,這個閉環不是可有可無的選擇,而是維持系統穩定、安全以及進行有效工作的最低要求。當機器人處於移動、操作或互動狀態時,此迴路必須持續不斷地運行。它不像軟體工作流或雲端推論管線(inference pipelines)可以有自然的停頓;在物理世界中,時間從不停止滴答流逝,智能必須與時間步調一致、亦步亦趨。
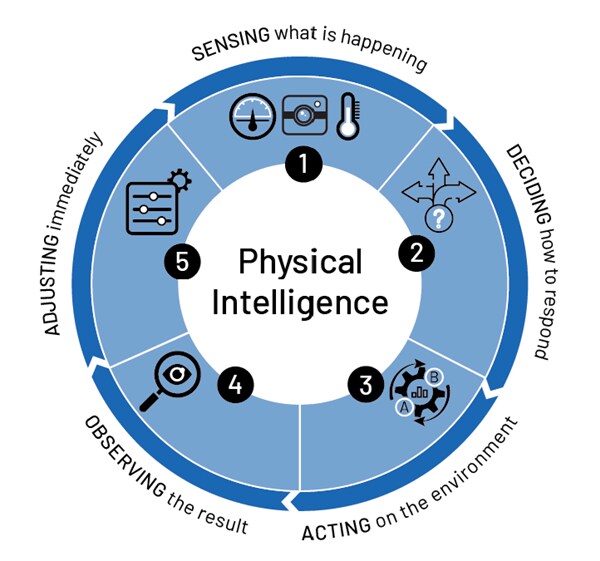
圖 1:物理智能閉環
當這個迴路協調良好時,機器人能平穩移動、應對不確定性,並自然地與人類協作。而當迴路崩潰時,其帶來的失敗並非抽象的概念,而是肉眼可見的猶豫、震盪、掉落零件、緊急煞車或安全事故。在軟體中,延遲的回應可能只意味著網頁載入緩慢;但在機器人學中,它意味著系統不穩定、設備損壞或無法接受的風險。
這就是為什麼物理智能在本質上是一個系統問題。它不僅取決於模型和演算法,更取決於感知、決策與控制如何被編排(orchestrated)成一個高度連貫、時間同步的系統。
從感知到行動
現代機器人擁有極為豐富的感知能力。視覺與深度相機用以繪製環境地圖;力量-扭矩感測器(force-torque sensors)用以測量互動;慣性測量單元(IMU)、關節編碼器以及觸覺感測器則針對機器人自身的身體提供連續的反饋。這些系統共同生成了連續的狀態流……這不是一張張的快照,而是對環境與機器本身不斷演進的理解。
然而,單憑感知並不等於智能。只有當感知被轉化為控制行動,且在現實世界的條件下保持穩定時,智能才會湧現。 這種轉化能力催生了諸如「具備接觸感知的操作」、「人類周圍的安全鄰近行為」、「搬運過程中的持續檢測」以及「在動態變化的環境中進行導航」等功能。這些都是在機器人與周圍環境同時處於運動狀態、且存在不確定性的情況下,隨著時間推移而持續維持的行為。這使得下一代機器人學從「由單一『大腦』偶爾做出決策」的架構,轉向「能夠支持持續感測、控制與響應」的全新架構。
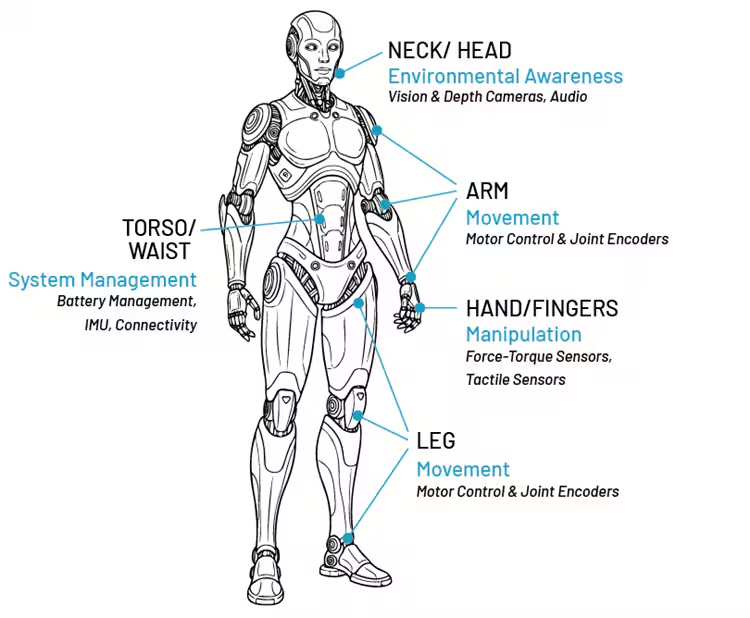
圖 2:現代機器人擁有豐富的感知能力
「意識」才是真正的運算前沿
物理智能帶來的願景並不僅僅是打造出更好的機器人,而是帶來更具自適應力的系統。
具備物理智能的機器人能夠:
-
無需經歷長時間的停機即可重新配置工作流程
-
無需重新編程即可處理零件與製程的變異性
-
在生產過程中直接進行檢測與調整,而非在失敗發生後才處理
-
在共享空間中與人類直接協作
-
在動態環境中移動而免受剛性條件的限制
所有這些能力都取決於意識(awareness):亦即持續對當前發生的狀況保持敏銳、並在條件變化時做出適當回應的能力。意識並不是疊加在自動化之上的功能,而是一個持續維持的狀態,是物理世界中實現自主性(autonomy)的先決條件。
為什麼物理智能始於邊緣
物理智能是「具體化/具身化(embodied)」的:它由感測、移動並與世界互動的物理身體所塑造,且與之不可分割。它具體落實在機器人的物理結構與動力學之中。它並非單獨作為抽象運算而存在,而是透過感測器、致動器與環境之間的持續反饋而湧現。
正因如此,物理智能必須生活在靠近機器人身體的地方,鄰近感測器、致動器以及它們所統御的動力學。這並不意味著所有的智能都是局部的,或者中央運算毫無用武之地。高階的推理、規劃、學習與協調依然受益於更廣泛的上下文與更長遠的週期。但是,分秒必爭的即時意識(亦即維持機器人穩定、響應與安全的智能)必須與機器本身緊密耦合。
結果就是,智慧機器人越來越像生物系統:高階層負責意圖與認知,而快速的反射動作與協調則分散於全身上下,全部作為一個同步系統來運作。這種從「集中式自動化」向「具身物理智能」的架構轉變,正是讓機器人能夠在開放、現實世界的條件下可靠運作的關鍵。
下一步發展
我們經常談論人工智慧(AI)如何驅動機器人學。但事實上,機器人學正越來越多地重塑 AI,迫使 AI 變得更加接地氣、更具備能源意識、更具分散性,並且更必須對物理學負責。物理智能需要的不仅仅是準確性或規模,它更需要圍繞著運動、互動與時間進行設計的系統。
如果我們想要讓 AI 能夠在現實世界中採取行動,我們就必須開始為現實世界設計它。現在是時候從頭開始重新思考智能了——就從那些能夠移動、感測並進行互動的機器開始。