摘要
提升工業系統智慧化的方法有多種,其中包括將邊緣和雲端人工智慧 (AI) 技術應用於配備類比和數位元件的感測器。鑑於 AI 方法的多樣性,感測器設計人員需要考慮若干相互衝突的要求,包括決策延遲、網路使用、功耗/電池壽命以及適合機器的 AI 模型。本系列文章重點介紹智慧 AI 無線馬達監測感測器的設計,並回答一些關鍵問題,例如:邊緣 AI 如何延長感測器電池的壽命?系統的洞察和決策能力有哪些提升?本文介紹的感測器利用邊緣 AI 演算法檢測異常馬達行為,進而觸發機器診斷和維護,最終延長馬達的使用壽命。
馬達健康狀況監測
對機器人與旋轉機器(例如渦輪機、風扇、泵浦與馬達)實施狀態監控 (CbM),會記錄與機器的健康及性能相關的即時數據,以便針對性地實施預測性維護與優化控制。在機器生命週期的早期進行針對性的預測性維護,可以減少生產停機的風險,從而提高可靠性、顯著節省成本並提高工廠的生產率。要對工業機器實施基於狀態的監控,可以利用一系列感測器數據,如電力測量、振動、溫度、油質、聲學、磁力和程序測量(如流量與壓力)。但是,振動測量是目前常見的方法,它可以非常可靠地指出不平衡和軸承故障等機械問題。本文將介紹 Voyager4 評估套件 (EV-CBM-VOYAGER4-1Z),這是一款穩健的低功耗無線振動監控平台,它讓設計人員能夠將無線解決方案快速部署到機器或測試設定中。Voyager4 感測器利用邊緣人工智慧 (AI) 演算法檢測異常馬達行為,進而觸發機器診斷與維護,最終延長馬達的使用壽命。本文是介紹 Voyager4 感測器的三部分系列文章的第 1 部分。該感測器可作為參考範例,幫助開發人員加速智慧系統的設計工作,以及理解設計過程中需要權衡的各種因素。
- 本系列文章的第 1 部分將介紹 Voyager4 無線狀態監控感測器,包括感測器架構的關鍵元素、硬體設計、功耗分析與機械整合。
- 本系列文章的第 2 部分將重點討論軟體架構與 AI 演算法,並說明在 Voyager4 上開發與部署 AI 模型的完整系統級方法。
- 本系列文章的第 3 部分將討論 AI 演算法的實際實現,以及 Voyager4 可以檢測的各種故障,例如不平衡、未對準(偏移)與軸承缺陷。
無線振動感測器的典型工作模式
目前市售的無線工業感測器通常以非常低的工作週期 (Duty Cycle) 運行。用戶設定感測器的休眠時長,感測器定期喚醒並測量溫度與振動,然後透過無線電將數據傳回用戶的數據伺服器。市售感測器通常聲稱電池壽命為 5 年,此壽命是基於每 24 小時擷取一次數據,或每 24 小時擷取多次數據而預測的。參見圖 1。
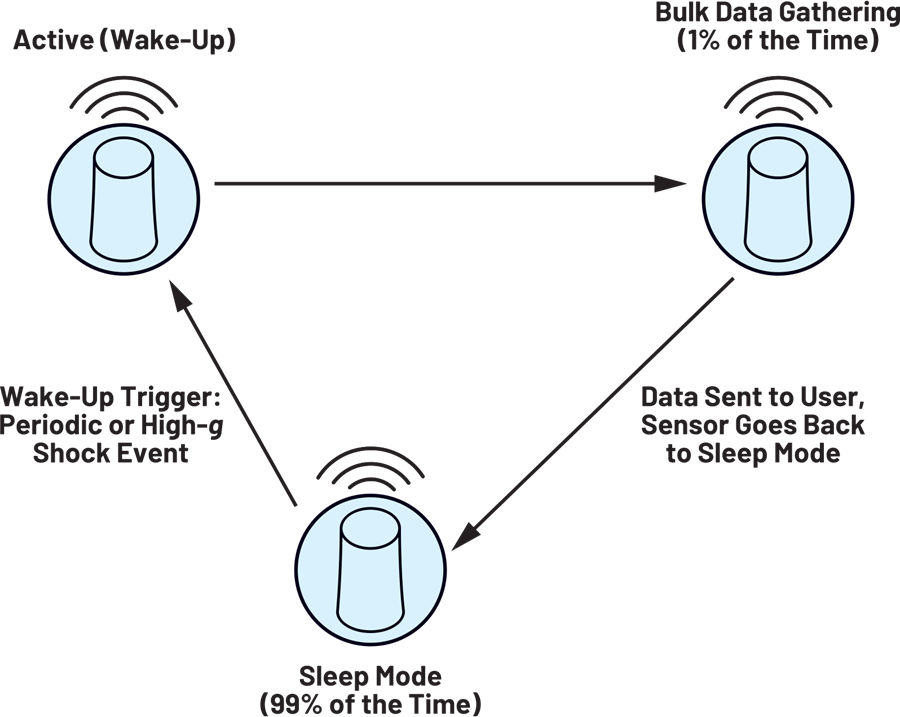
圖 1. 工業無線感測器的典型操作。
大多數情況下,感測器 90% 以上的時間處於休眠模式。Voyager4 感測器也以類似方式運行,但會利用邊緣 AI 異常檢測(採用 MAX78000 AI 微控制器)來限制無線電的使用。當感測器喚醒並測量數據時,只有微控制器檢測到數據中存在異常時,才會將數據傳回用戶。藉助邊緣 AI,電池壽命可延長至少 50%(參見「硬體系統與功耗分析」部分)。
Voyager4 感測器系統工作原理
Voyager4 感測器的工作原理如圖 2 所示。ADXL382 三軸 8 kHz 數位微機電系統 (MEMS) 用於採集振動數據。首先,原始振動數據沿著路徑 A 到達 MAX32666 低功耗藍牙® (BLE) 處理器。數據可以透過無線 BLE 或 USB 發送給用戶。藉助 MAX78000 工具,這些原始振動數據用於訓練邊緣 AI 演算法。
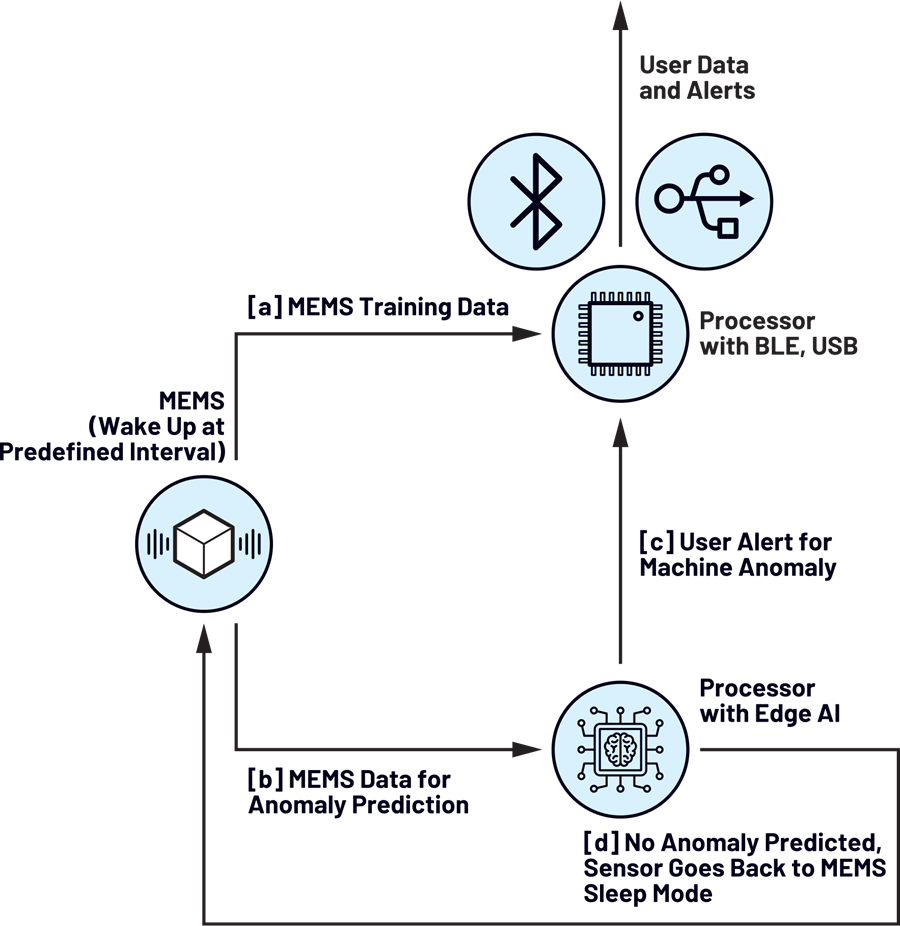
圖 2. Voyager4 感測器的工作原理。
利用 MAX78000 工具將 AI 模型合成為 C 程式碼。邊緣 AI 演算法透過 BLE 無線 (OTA) 更新發送到 Voyager4 感測器,並利用搭載邊緣 AI 硬體加速器的 MAX78000 處理器儲存在記憶體中。在 Voyager4 初始訓練階段之後,ADXL382 MEMS 數據可以採用圖 2 所示的路徑 B。MAX78000 邊緣 AI 演算法將根據採集到的振動數據,預測機器運行是否正常。如果振動數據正常,則無需使用 MAX32666 的無線電功能。Voyager4 感測器按照圖 2 所示的路徑 D 進行操作,MEMS 返回休眠模式。但是,如果演算法預測振動數據存在異常,則操作按照路徑 C 進行,並透過 BLE 向用戶發送振動異常警報。本系列文章的第 2 部分將詳細解釋該邊緣 AI 的實現細節。
硬體系統與功耗分析
圖 3 概要顯示了 Voyager4 硬體系統。ADXL382 是一款低雜訊密度、低功耗、3 軸 MEMS 加速度計,具有可選測量範圍。該元件支援 ±15 g、±30 g 和 ±60 g 範圍以及 8 kHz 的寬測量頻寬。ADG1634 單刀雙擲 (SPDT) CMOS 開關用於將 MEMS 原始振動數據傳輸至 MAX32666 的無線 BLE 或 MAX78000 AI 微控制器。BLE 微控制器用於控制 SPDT 開關。其他幾個週邊連接到 MAX32666,包括用於監測電池電流的 MAX17262 電量計以及超低功耗 ADXL367 MEMS 加速度計。ADXL367 用於在高振動衝擊事件中將無線 BLE 從深度睡眠模式喚醒。在運動致動的喚醒模式下,它僅消耗 180 nA 電流。BLE 微控制器可利用 FTDI FT234XD-R 透過 BLE 或 USB 將 ADXL382 MEMS 的原始數據傳輸到主機。
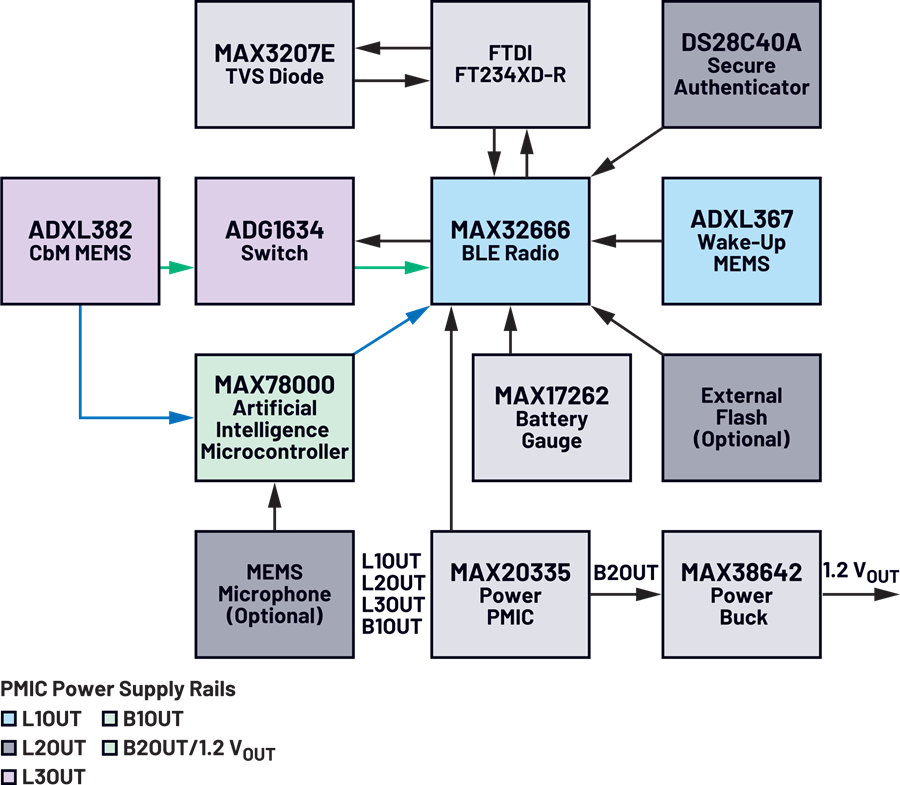
圖 3. Voyager4 硬體系統。
Voyager4 感測器採用 MAX20335 電源管理積體電路 (PMIC),如圖 3 和圖 4 所示。該 PMIC 具有兩個超低靜態電流降壓穩壓器和三個超低靜態電流低壓降 (LDO) 線性穩壓器。每個 LDO 和降壓穩壓器的輸出電壓均可單獨致能和禁用,並且每個輸出電壓值均可透過 I2C 程式化(預設值已預配置)。BLE 處理器用於針對 Voyager4 的不同工作模式,致能或禁用各個 PMIC 電源輸出。
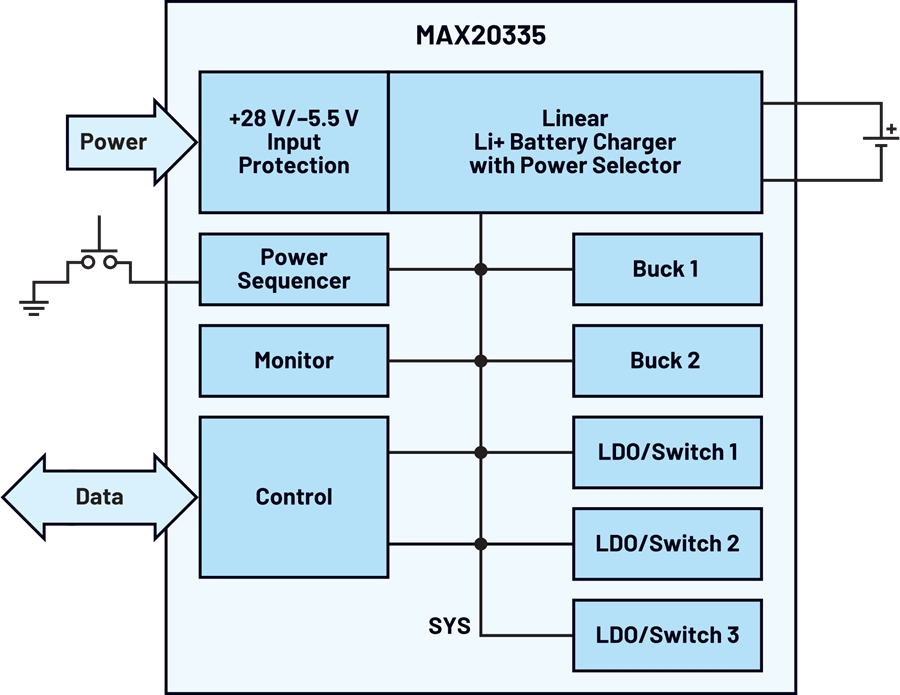
圖 4. MAX20335 PMIC。
表 1 詳細列出了 Voyager4 感測器的不同工作模式。
表 1. Voyager4 感測器工作模式與相應的 MAX20335 PMIC 電源配置
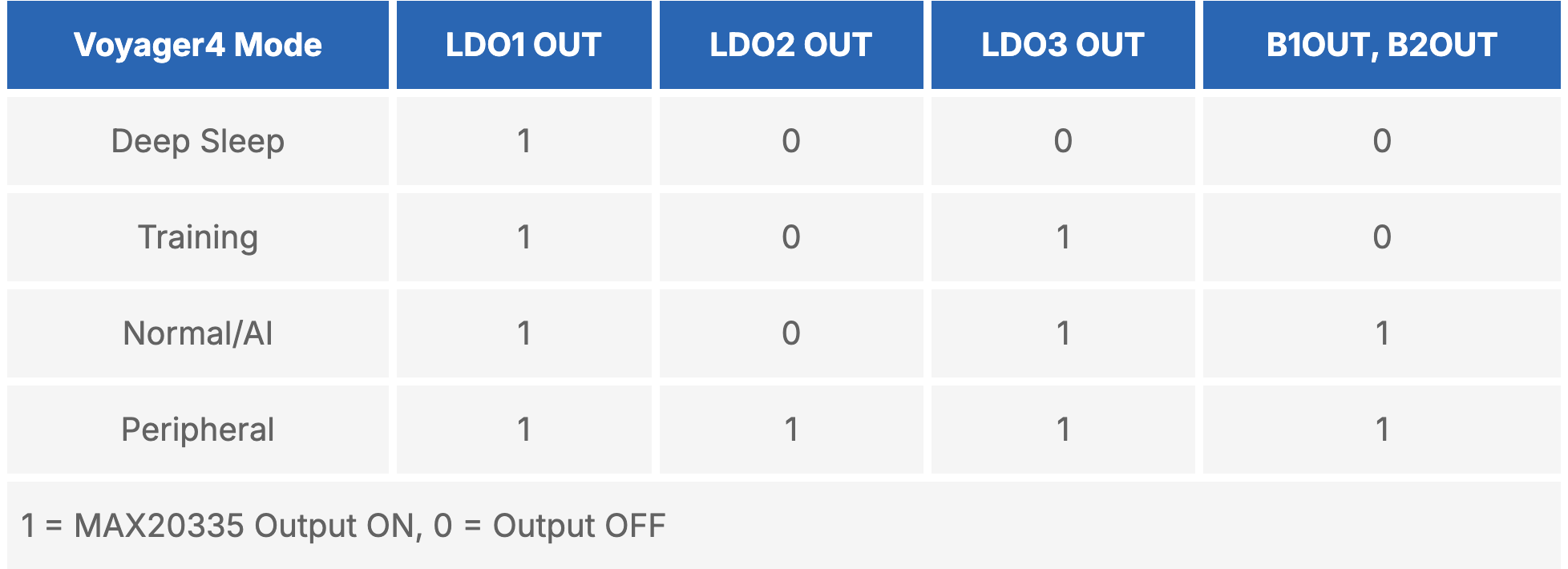
表 2 詳細列出了 MAX32666 和 MAX78000 處於啟動模式或停用模式下,各項特性的啟動情況。例如,對於訓練模式,BLE 微控制器必須首先在 BLE 網路中廣播其存在,然後與網路伺服器建立 BLE 連線。Voyager4 隨後透過 BLE 網路傳輸 ADXL382 MEMS 原始數據,以在用戶的 PC 上訓練 AI 演算法。
表 2. Voyager4 BLE、AI 與深度睡眠模式
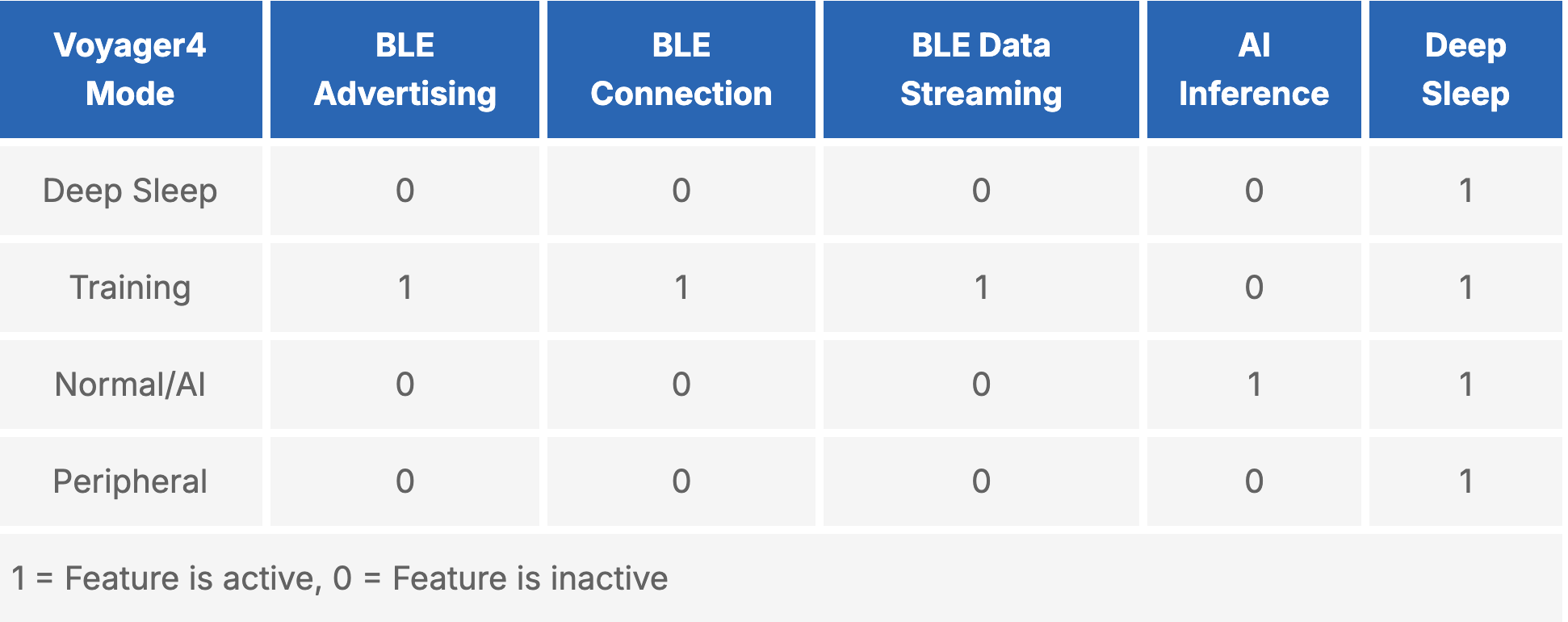
然後,Voyager4 感測器返回深度睡眠模式。在正常 (AI) 模式下,無線 BLE 的廣播、連線與串流傳輸特性預設禁用。每隔一定週期,MAX78000 就會喚醒並執行 AI 推論。如果未檢測到異常,則 Voyager4 返回深度睡眠模式。
Voyager4 評估套件的平均功耗是根據其在深度睡眠、訓練與正常/AI 模式下的事件間隔時間來衡量的。圖 5 顯示了平均功耗的彙整情況。 Voyager4 評估套件 (EV-CBM-VOYAGER4-1Z) 包含了多個方便客戶評估的元件(LED、上拉電阻)。這些元件由 LDO1OUT 電源軌供電,功耗為 0.3 mW(深度睡眠模式),如圖 5 所示。 當評估套件在訓練模式下運行時,如果 BLE 處於活動狀態,每小時廣播、連線與傳輸數據一次,功耗超過 0.65 mW。如果 Voyager4 感測器在 AI 模式下運行,即使感測器每小時啟動一次,功耗也只接近 0.3 mW。 圖 5 顯示,當感測器無需傳輸原始 BLE 數據時,其功耗降低多達 50%。 在大約 0.3 mW 的功耗下,一顆 1500 mAh 電池(例如 TinyCircuits 的可充電 ASR00073)可工作長達兩年;如果使用兩顆標準 AA 型 2.6 Ah LS14500 Saft 電池,則可工作 7 年以上。Saft 的 LS 14500 電池具有低基極電流和週期性脈衝特性,非常適合長期應用(通常 5 至 20 年以上)。
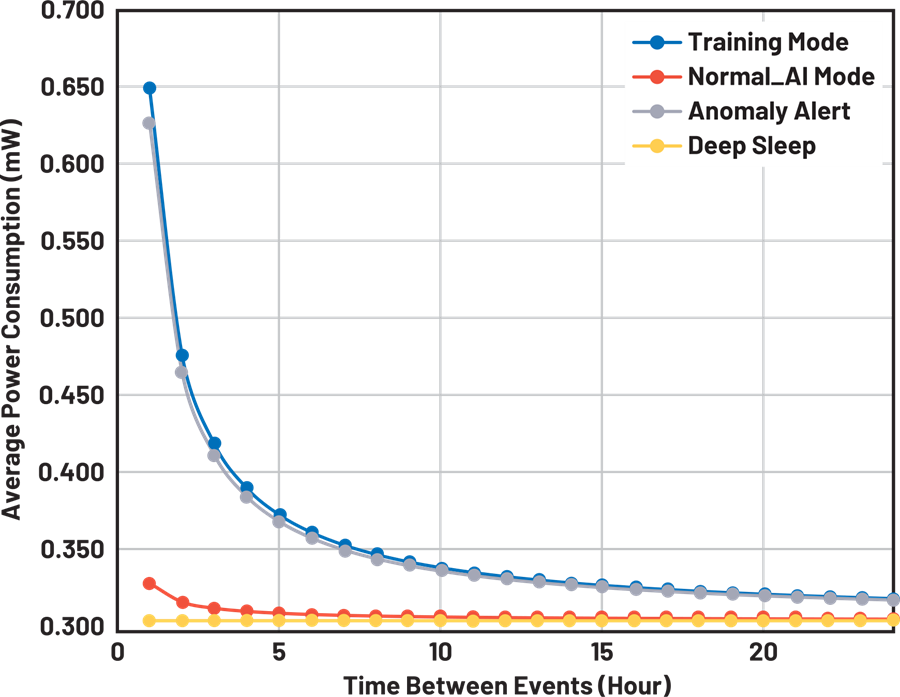
圖 5. 平均功耗與事件間隔時間的關係。
Voyager4 感測器機械設計
Voyager4 感測器直徑為 46 mm,最小高度為 77 mm。底座上有一個 M6 螺紋孔,可透過螺栓或粘著劑將其安裝到馬達外殼上。圖 6 為機械組件的分解圖,它包含鋁製底座與壁殼,並採用 ABS 塑膠蓋以減輕 BLE 數據傳輸的天線屏蔽效應。BLE 和邊緣 AI 微控制器的 PCB 垂直安裝,電池固定在支架上。MEMS 感測器與電源的 PCB 置於底座上,靠近被監測的振動源。
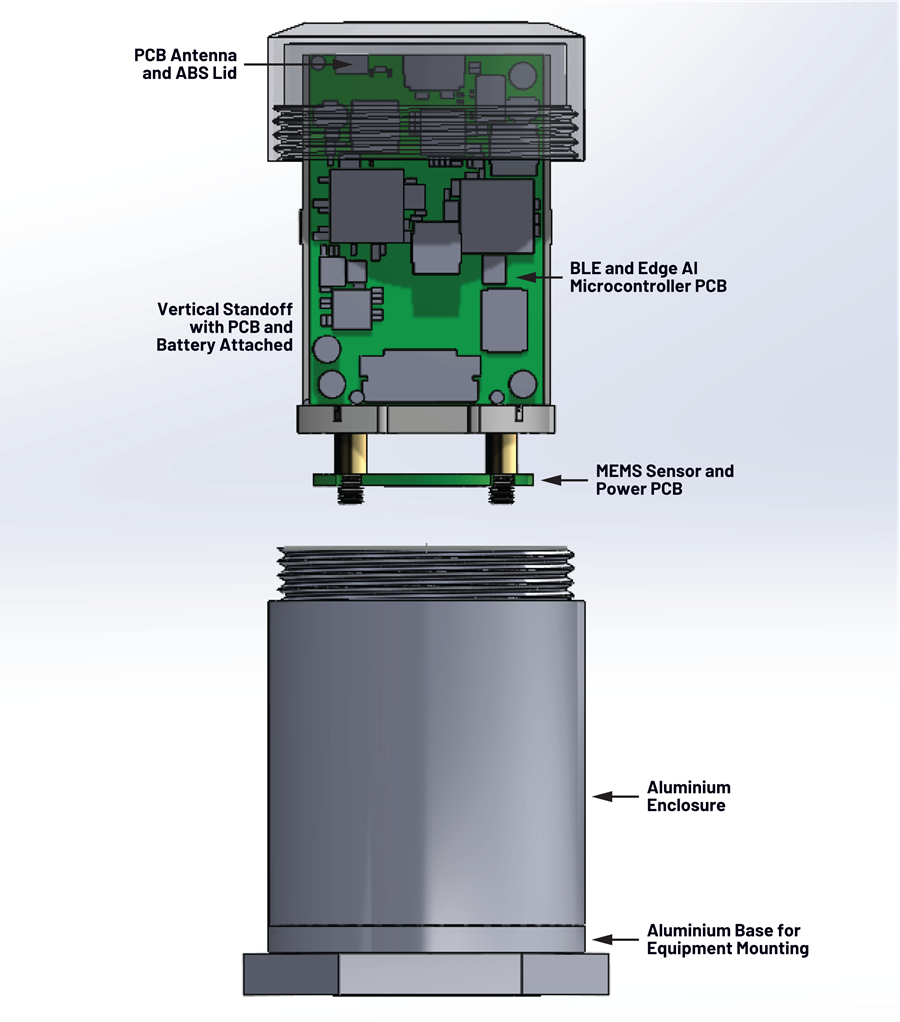
圖 6. Voyager4 感測器外殼,機械組件。
機械模態分析
為 MEMS 加速度計設計一個結構良好的機械外殼,確保從被測對象中提取高品質的 CbM 振動數據。理解模態分析是設計出良好機械外殼的必要條件。
什麼是模態分析,為什麼它如此重要?
模態分析用於了解結構的振動特性。它可以提供設計的固有頻率和正常模式(相對變形而言)。使用模態分析時,關鍵問題是要避免諧振,此時結構設計的固有頻率與施加的振動負載的固有頻率非常接近。對於振動感測器,外殼的固有頻率必須大於由 MEMS 感測器測量的所施加振動負載的固有頻率。Voyager4 的 X、Y 和 Z 軸上的 3 dB 頻寬為 8 kHz。在低於 8 kHz 的頻率下,感測器外殼不應產生明顯的諧振。
固有頻率與振型
ANSYS 和其他模擬工具提供了模態分析外掛程式,有助於設計人員探索幾何形狀、材料選擇和機械組件對感測器外殼頻率響應的影響。感測器外殼的質量、剛度與固有頻率之間相互關聯。 方程 1 為質量矩陣 [M]、剛度矩陣 [K]、角頻率 ωi 和振型 {∅i} 的關係式,用於諸如 ANSYS 的 FEM 程式進行計算。ωi 除以 2π,可以計算得出固有頻率 fi,振型 {∅i} 提供特定固有頻率下材料的相對變形模式。

對於單自由度系統,頻率可以用方程 2 來簡單表示。

方程 2 提供了一種簡單、直觀的設計評估方法。如果降低感測器外殼的高度,使得剛度增大、質量減小,從而提高固有頻率。此外,如果增加外殼的高度,剛度減小、質量增大,固有頻率隨之降低。大多數設計都具有多個自由度。有些設計具有數百個自由度。利用有限元素方法可以快速得出方程 2 的計算結果,如果採用手動計算則非常耗費時間。
使用模擬工具及方程 1 和 2,並仔細選擇材料,可確保實現頻率響應的設計目標。更多資訊請參閱「如何利用模態分析設計出色的振動感測器外殼」一文,其中全面概述了模態分析。
模式參與因子
模式參與因子 (MPF) 用於確定哪些模式和固有頻率對於設計更重要。方程 3 是振型 {∅i}、質量矩陣 [M] 和激勵方向向量 D 的關係式,用於求解 MPF。參與因子的平方即是有效質量。

MPF 和有效質量測量每種模式下在每個方向移動的質量數。一個方向上的值較高意味著在該方向上,模式將被力(例如振動)激勵。
為了完成模態分析解析,您需要了解結構上的所有點都會按相同頻率(全域變數)振動,但每個點的振動幅度(或振型)是不同的。例如,18 kHz 頻率對機械外殼頂部的影響比底部大。
Voyager4 模態模擬與實驗室測試
Voyager4 感測器組件的模擬採用了以下材料:外殼底部與中間部分使用 3003 鋁合金,蓋子使用 ABS-PC 塑膠。 模態分析模擬結果如表 3 所示,在目標頻率範圍內共獲得了 14 個模式結果。X、Y、Z 方向的 MPF 以表格顯示。最強的模式以藍色高亮顯示。模擬結果用於檢查這些相對較強模式的變形位置。
表 3. 模態分析模擬結果

模式 1 和 2 類似,會影響 ABS-PC 蓋子,如圖 7 所示。
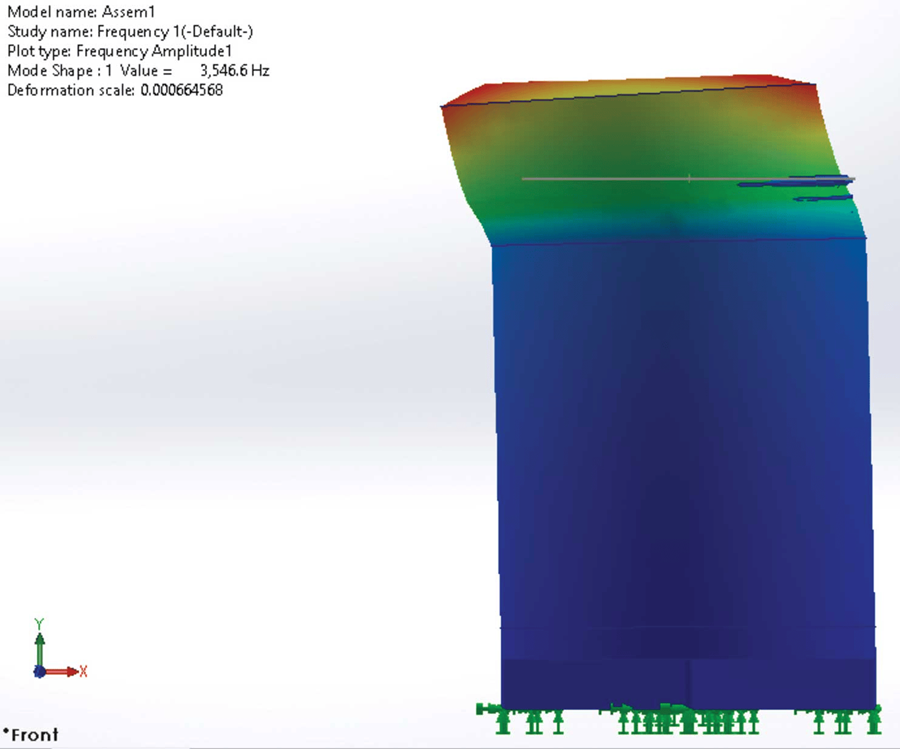
圖 7. 模式 1,蓋子變形,遠離剛性感測器底座。
基於模式 1 的位置遠離底座感測器 PCB,這個小諧振不會影響 ADXL382 MEMS 的性能。 表 3 著重強調的模式 7 發生在 Z(垂直)軸上大約 7.25 kHz 頻率處。圖 8 顯示其對外殼的垂直壁有一些明顯的影響。然而,底座並未受到模式 7 的強烈影響。

圖 8. 模式 7,頻率為 7.25 kHz,對外殼鋁壁有明顯的影響。
該模態模擬表明,沒有任何模式會對位於外殼底座上的 ADXL382 感測器 PCB 產生明顯的影響,並且 8 kHz 的 3 dB 頻寬內不會出現顯著的機械諧振。 為了驗證模擬結果,我們將 Voyager4 感測器放置在模態振動器上,輸入振動為恆定的 0.25 峰值 (g),頻率掃描範圍為 0 kHz 至 8 kHz。在最高 8 kHz 的頻率範圍內,Voyager4 感測器的頻率響應在 ±1.5 dB 以內,如圖 9 所示。
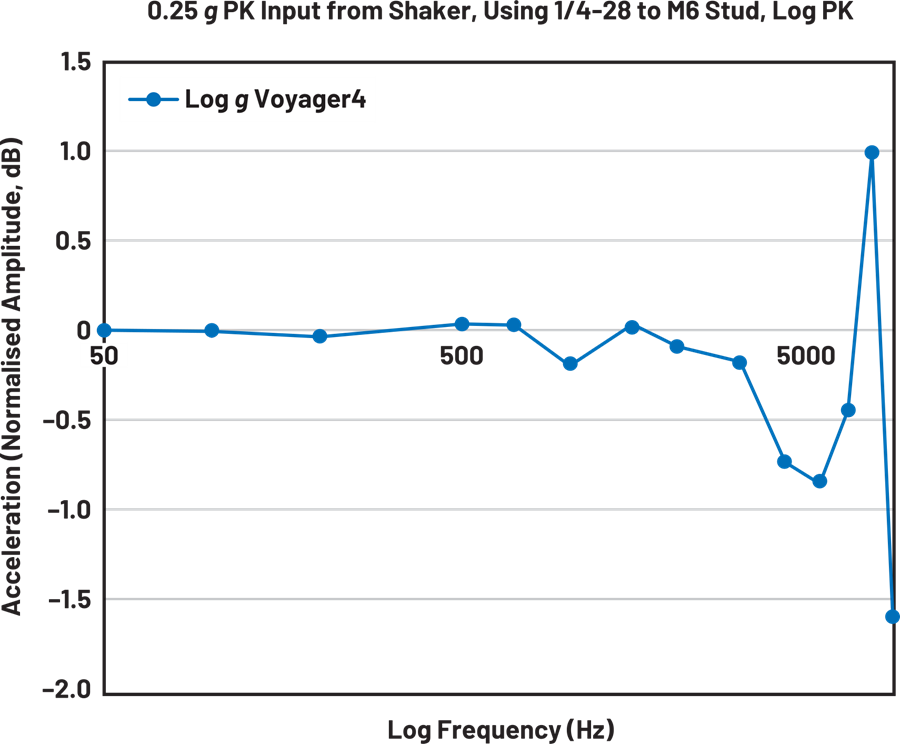
圖 9. Voyager4 感測器頻率響應。
結語
搭載嵌入式 AI 硬體加速器的微控制器可以提升無線感測器節點的決策能力,並延長其電池壽命。藉助邊緣 AI,電池壽命可延長至少 50%。對振動感測器外殼進行模態分析能夠加速感測器的開發週期,並確保從被測對象中獲取高品質的振動數據。