想像一下,一台機器人走出安全圍欄,不再只是執行單一預先編寫好的程式動作,而是與人類並肩工作。它能穿梭於雜亂的走道;當棧板發生意料之外的位移時,它會停下腳步;它能抓取從未見過的零件,並根據力量反饋(force feedback)調整抓取力道,在不造成產線停機的情況下完成任務。

想像一下,一台機器人走出安全圍欄,不再只是執行單一預先編寫好的程式動作,而是與人類並肩工作。它能穿梭於雜亂的走道;當棧板發生意料之外的位移時,它會停下腳步;它能抓取從未見過的零件,並根據力量反饋(force feedback)調整抓取力道,在不造成產線停機的情況下完成任務。

本文介紹了如何將 Gigabit 多媒體序列鏈路(GMSL™) 技術無縫橋接到乙太網路(Ethernet)領域,以構建一個完全符合 RFC 規範、高速且低延遲的多相機視訊串流完整鏈路。為了獲得高效能、低功耗與靈活的架構,整個高速視訊串流管線(pipeline)完全利用 FPGA 資源來實現。

什麼是物理智能(physical intelligence)?本篇專欄的核心在於定義何謂物理智能、為什麼它與傳統的自動化或雲端人工智慧(Cloud AI)有著根本上的不同,以及當智能離開抽象的數據世界,進入充滿運動、力和互動的物理世界時,有哪些至關重要的考量因素。

近期推出的跨感應器電壓調節器TLVR,在為低電壓、大電流負載(如 CPU、GPU 和 ASIC)供電的多相直流對直流(DC-to-DC)應用中大受歡迎。這一趨勢主要歸功於該技術卓越的瞬態響應效能。TLVR 同時提供了設計與佈局的靈活性,但它也存在若干缺點。本文將闡明 TLVR 的設計選擇如何影響效能參數,並討論相關的權衡取捨。

本文呈現了對一款尖端智慧振動感測器的深入探討,強調其設計、功能與應用,這一切均植根於微機電系統(MEMS)技術。該感測器的核心目標是在各種工業與研究環境中提供高精度、可靠性及即時監測能力,展現了 ADI 不同 MEMS 感測技術的應用。

透過單一電纜以高可靠性傳輸影像、控制訊號和電源,提供了一個極具前景的解決方案。本文探討了相機在機器人領域的部署方式、其面臨的連接挑戰,以及 GMSL 如何助力打造具備擴展性、穩健性且效能驅動的機器人平台。

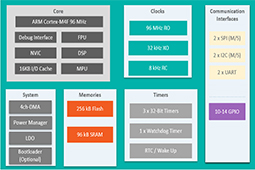
隨著對智慧邊緣裝置的需求爆炸式增長,AI 正迅速向邊緣遷移,但許多開發者仍面臨難以將強大模型嵌入微型微控制器的困境。開發者面臨著陡峭的學習曲線,必須同時處理數據預處理、模型選擇、超參數調校以及硬體特定的優化。
5G 的到來預示著物聯網(IoT)時代的降臨。雖然末端使用者是以無線方式連接網路,但網路核心仍需穩定可靠的有線連接,因此光纖通訊是典型的互連方式。本文描述了如何使用 Maxim 的微控制器來設計光模組,這是光纖通訊中不可或缺的重要部分。
