摘要
機器人系統日益依賴視覺來感知環境並與之互動,這使得對高速、低延遲數據傳輸鏈路的需求不斷增長。Gigabit Multimedia Serial Link (GMSL™)透過單一電纜以高可靠性傳輸影像、控制訊號和電源,提供了一個極具前景的解決方案。本文探討了相機在機器人領域的部署方式、其面臨的連接挑戰,以及 GMSL 如何助力打造具備擴展性、穩健性且效能驅動的機器人平台。
前言
機器人系統越來越依賴先進的機器視覺來感知、導航並與環境互動。隨著相機數量和解析度的提升,對於能夠傳輸與匯聚即時影像數據的高速、低延遲鏈路需求達到了前所未有的高度。
最初為汽車應用開發的 Gigabit Multimedia Serial Link (GMSL™),正逐漸成為機器人系統中強大且高效的解決方案。GMSL 透過單一電纜傳輸高速影像數據、雙向控制訊號和電源,提供長距離的電纜佈線能力,以及具有極低誤碼率 (BER) 的微秒級確定性延遲。它簡化了線束並縮小了整體解決方案的體積,非常適合在動態且通常嚴苛的環境中運作、以視覺為核心的機器人。
接下來的章節將討論相機在機器人中的應用場景與方式、這些應用面臨的數據與連接挑戰,以及 GMSL 如何協助系統設計人員建構具擴展性、可靠且高效能的機器人平台。
機器人中的相機應用於何處?
相機是現代機器人感知的核心,使機器機能夠即時理解並回應周遭環境。無論是在倉庫中穿梭於貨架間的導航機器人、正在分揀包裹的機械手臂,還是與人互動的服務型機器人,視覺系統對於實現自主性、自動化與互動至關重要。這些相機不僅功能多樣,形式也各不相同——根據任務需求安裝在機器人的不同部位,並針對平台的物理與運作限制進行優化(參見圖 1)。
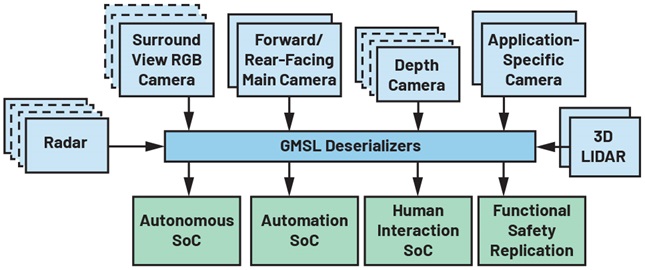
圖 1:由 GMSL 支援的多模態機器人視覺系統範例。
自主性 (Autonomy)
在自主移動機器人中,相機充當了機器的「眼睛」,使其能夠感知周遭環境、避開障礙物,並在環境中進行自我定位。對於送貨機器人、倉庫接駁車或農業機器人而言,這通常需要結合安裝在機器人角落或邊緣的寬視野相機。這些環視系統 (Surround-view systems) 提供 $360^{\circ}$ 的感知能力,幫助機器人在複雜空間中導航而不會發生碰撞。
此外,某些自主應用會使用朝下或朝上的相機來讀取地面、天花板或牆面上的標記 (Fiducial markers)。這些標記如同視覺路標,讓機器人在工廠或醫院等結構化環境中移動時,能重新校準位置或觸發特定動作。在更先進的系統中,立體視覺相機 (Stereo vision) 或飛時測距 (ToF) 相機會安裝在前方或側面,以生成 3D 地圖、估算距離並輔助即時定位與地圖構建 (SLAM)。
自動化 (Automation)
在工業自動化領域,視覺系統幫助機器人快速且穩定地執行重複性或高精度任務。相機通常安裝在機械手臂上(緊鄰夾爪或末端執行器),系統可以精確地對物體進行視覺檢測、定位與操作。這在取放作業 (Pick-and-place) 中尤為重要,因為識別零件或包裹的精確位置與朝向是核心關鍵。
其他情況下,相機會固定在工作區上方(如龍門架或高架軌道),用於監控輸送帶上的物品或掃描條碼。在倉庫環境中,移動機器人利用前向相機檢測貨架標籤、標誌或 QR code,從而實現動態任務分配或路徑變更。
人機互動 (Human Interaction)
相機在機器人與人類的互動中也扮演核心角色。在協作製造、醫療保健或服務業,機器人需要理解手勢、識別面孔並維持社交存在感。視覺系統使這一切成為可能。
人型機器人與服務機器人通常在頭部或胸部嵌入相機,模擬人類視線以實現自然互動。這些相機能幫助機器人解讀面部表情、維持眼神接觸或跟隨人的視線。在協作機器人 (Cobot) 場景中,機器視覺用於確保安全,例如監測是否有肢體靠近,並及時調整行為以避免碰撞。
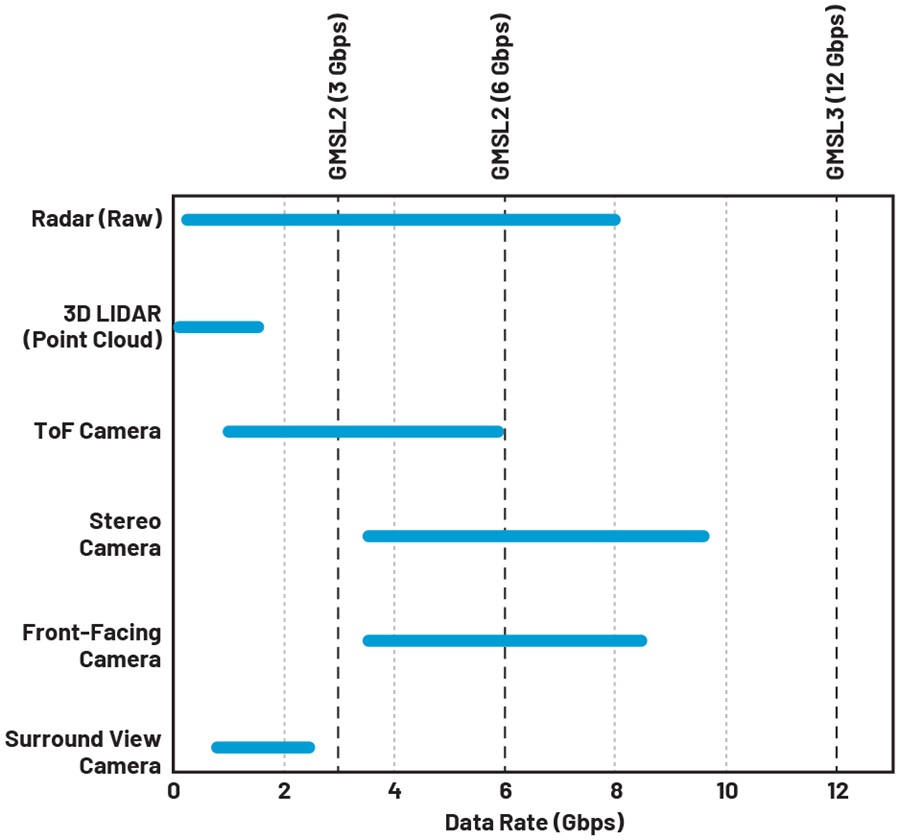
圖 2:感測器頻寬範圍與 GMSL 支援能力。
由於 GMSL 採用頻域雙工 (Frequency-domain duplexing) 技術來區隔前向(影像與控制)與反向(控制)通道,因此能夠在沒有數據碰撞風險的情況下,實現低延遲且具備確定性 (Deterministic) 的雙向通訊。
在所有鏈路速率下,GMSL 都能維持極低的延遲:從 GMSL 串列器 (Serializer) 輸入到解串列器 (Deserializer) 輸出所產生的額外延遲,通常僅在數十微秒 (μs) 左右,這對於大多數即時機器人視覺系統而言幾乎可以忽略不計。
確定性的反向通道延遲,賦予了主機對相機進行精確硬體觸發 (Hardware triggering) 的能力。這對於多感測器間的同步影像擷取,以及複雜機器人工作流程中對時間敏感、事件驅動的幀觸發至關重要。若使用 USB 或乙太網路相機,要達到這種等級的時間精度通常需要額外增加獨立的硬體觸發線,這會增加系統的複雜度與佈線成本。
體積精簡與低功耗
GMSL 的核心價值之一在於其大幅減少了電纜與連接器的基礎設施需求。GMSL 本身是一種全雙工鏈路,且大多數 GMSL 相機利用同軸供電 (Power-over-Coax, PoC) 功能,使影像數據、雙向控制訊號與電源都能透過單一根細同軸電纜傳輸。這顯著簡化了佈線,減輕了線束的整體重量與體積,並降低了在緊湊或關節式機器人平台中機械佈線的難度(參見圖 3)。
此外,GMSL 串列器 (Serializer) 是一款高度整合的元件,它將影像介面(例如 MIPI-CSI)與 GMSL 實體層 (PHY) 整合於單一晶片中。GMSL 串列器的功耗在 6 Gbps 模式下通常約為 260 mW,與具備類似數據吞吐量的其他技術相比,其低功耗表現優異。所有這些特性都能轉化為更小的電路板面積、更低的散熱需求(通常無需笨重的散熱片),並提升整體的系統效率,這對於電池供電的機器人尤為重要。
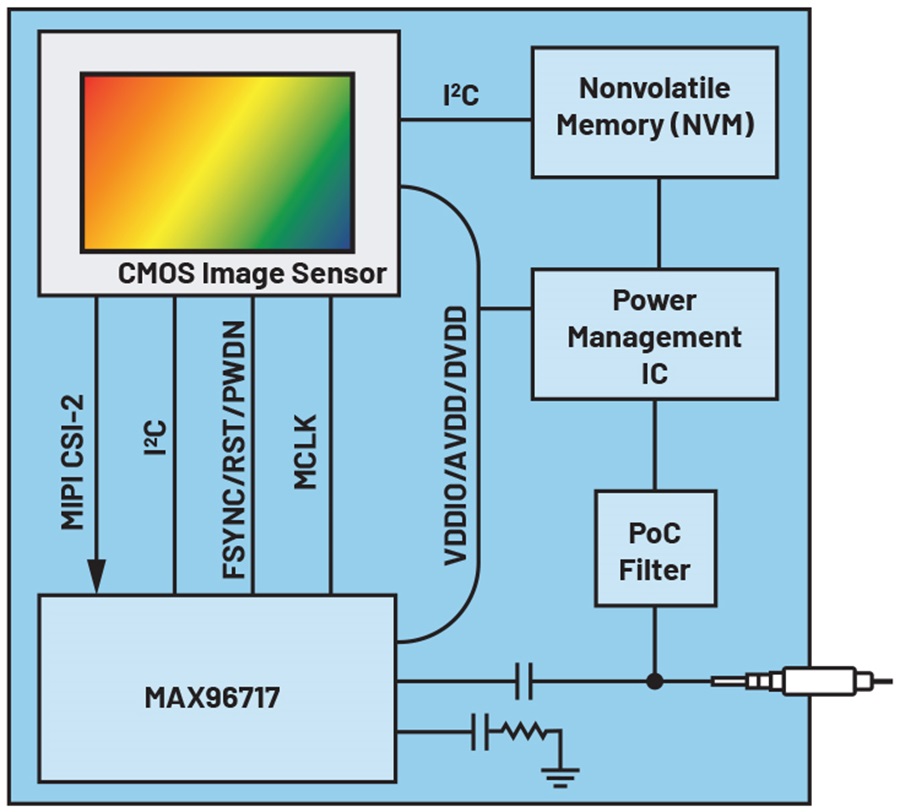
圖 3:使用 MAX96717 的典型 GMSL 相機架構。
感測器匯聚與影像數據路由
GMSL 解串列器(Deserializer)提供多種配置,可支援 1、2 或 4 個輸入鏈路,實現靈活的感測器匯聚架構。這使設計人員能將多個相機或感測器模組連接至單一處理單元,而無需額外的交換器或外部多工器,這在多相機機器人系統中尤為實用。
除了多輸入特性外,GMSL SERDES 還支援先進功能,可智慧化地管理與路由系統內的數據,包括:
-
I2C 與 GPIO 廣播: 用於同步感測器配置與幀同步(Frame synchronization)。
-
I2C 位址別名(Address Aliasing): 避免在透傳模式(Passthrough mode)下發生 I2C 位址衝突。
-
虛擬通道重新分配(Virtual Channel Reassignment): 允許將多個影像串流清晰地映射到系統單晶片(SoC)內的幀緩衝器中。
-
影像串流複製與虛擬通道過濾: 允許將選定的影像數據傳送至多個 SoC。例如,從同一個相機饋送中同時支援自動化與互動管線,或支援冗餘處理路徑以增強功能安全。
安全性與可靠性
GMSL 最初是為汽車先進駕駛輔助系統(ADAS)應用而開發,已在對安全性、可靠性與穩健性要求極高的環境中經過實地驗證。機器人系統,特別是在人員周圍運作或執行關鍵任務的工業機器人,同樣能受益於這些高標準。
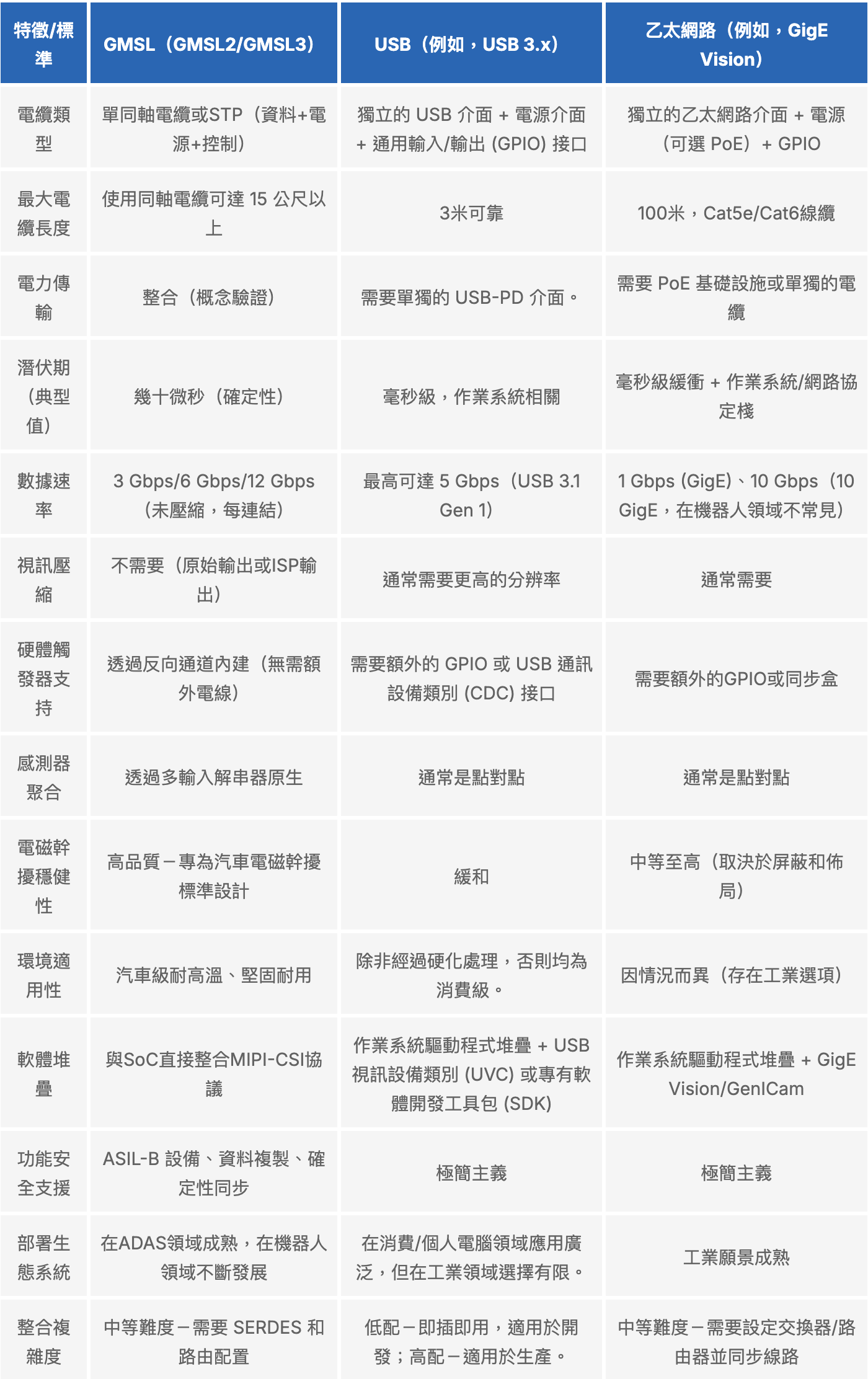
表 1:GMSL 與乙太網路:機器人視覺技術權衡比較
大多數 GMSL 串列器(serializer)與解串列器(deserializer)均經過認證,可在 –40°C 至 +105°C 的溫度範圍內運作,並內建自適應等化(adaptive equalization)功能,可針對環境變化持續監控並調整收發器設定。這為系統架構師提供了靈活性,得以設計出在極端或波動溫度條件下仍能可靠運作的機器人。
此外,大多數 GMSL 元件符合 ASIL-B 標準,並展現出極低的誤碼率(BER)。在符合規範的鏈路條件下,GMSL2 提供的典型誤碼率為 $10^{-15}$,而具備強制性前向錯誤更正(FEC)的 GMSL3,其誤碼率可低至 $10^{-30}$。這種優異的數據完整性結合安全認證,顯著簡化了系統級的功能安全整合。
最終,GMSL 的穩健性將減少停機時間、降低維護成本,並對系統長期可靠性建立更大的信心——這在工業與服務機器人部署中均是至關重要的優勢。
成熟的生態系統
GMSL 受益於一個成熟且可供部署的生態系統,這是由汽車系統多年來的大量使用所塑造而成,並得到廣泛的全球生態系統合作夥伴網路支持。這包括了完整的評估用與量產就緒相機、運算板、電纜、連接器以及軟體/驅動程式支援——所有這些都在嚴苛的真實世界條件下經過測試與驗證。對於機器人開發者來說,這個生態系統轉化為更短的開發週期、簡化的整合,以及從原型過渡到量產時更低的規模化門檻。
GMSL 與傳統機器人視覺連接技術的對比
近年來,GMSL 在汽車產業以外變得越來越容易取得,為高效能機器人系統開啟了新的可能性。隨著對機器人視覺的需求成長,需要更多的相機、更高的解析度、更緊密的同步以及更嚴苛的環境,傳統介面如 USB 和乙太網路(Ethernet)在頻寬、延遲和整合複雜度方面往往顯得力不從心。GMSL 現在正成為一種首選的升級路徑,提供穩健、可擴展且量產就緒的解決方案,並在許多先進機器人平台中逐漸取代 USB 和乙太網路。表 1 比較了這三種技術在機器人視覺設計相關關鍵指標上的表現。
結論
隨著機器人進入日益嚴苛的環境與多樣化的使用案例,視覺系統必須演進以支援更高的感測器數量、更大的頻寬與確定性的效能。雖然傳統的連接解決方案對於開發和某些部署場景仍然重要,但它們在延遲、同步和系統整合方面引入了權衡,限制了可擴展性。GMSL 結合了高數據速率、長電纜長度、整合供電以及雙向確定性的低延遲,為建構可擴展的機器人視覺系統提供了經過驗證的基礎。藉由採用 GMSL,設計者可以加速從原型到量產的轉型,交付更智慧、更可靠的機器人,以應對廣泛現實世界應用中的挑戰。